prefaces
CV课的大作业,两篇论文: “Local Features and Kernels for Classification of Texture and Object Categories: A Comprehensive Study” 和 “Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories”,的阅读、方法的总结以及后者的实现。
本文是第一篇论文的阅读。
总结
选题选的是“基于BoW特征的图像分类”,首先BoW特征在网上的资料也很多,主要方法就是类比NLP中的构建词库的方法,对所有特征进行一个聚类,得到词库,并且得到图像在这些特征上的直方图,根据直方图进行匹配。
论文1的阅读
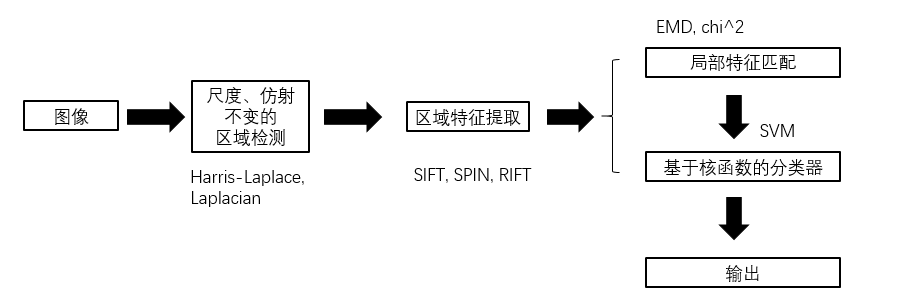
本文方法的构成包括四个要素: (1) 尺度和仿射变换不变区域检测算子; (2) 区域特征描述子; (3) 局部特征匹配方法; (4) 分类器以及核函数。 方法的整体流程是:首先由检测算子检测感兴趣的区域,再由描述子提取局部特征,由局部特征匹配方法计算任意两张图像的匹配分数,再由基于核函数的分类器分类(主要是 svm)。 而局部特征匹配方法是作为计算核函数的一部分,可以将 (3)(4) 合并。
尺度和仿射变换不变区域检测算子
首先要对图像感兴趣的区域检测,本文关注尺度不变、旋转不变、仿射不变三种特性。
尺度不变:
本文选取的是 Harris-Laplace 和 Laplacian 检测算子,分别对角点区域、联通区域检测,而本身两种检测算子本身满足尺度不变的特点。
旋转不变: 本文采取了两种方法,一是使用旋转不变的特征描述子,SPIN 和 RIFT,二是将圆形区域旋转到主梯度方向,并取主梯度方法为区域内所有梯度之和。
仿射不变: 使用仿射适应修正梯度算子。
区域特征描述子
区域特征提取上,本文选取了三种描述子: SIFT, SPIN 和 RIFT。
SIFT描述子: 计算支撑区域的梯度方向直方图。 具体而言,在 4x4 的子块上,统计八方向梯度的直方图,共计128维特征,并将同方向的梯度累积,最后累积还要对区域内不同位置的梯度取权重,权重是该位置到区域中心的L2距离取标准高斯。使得靠近中心的梯度更大。
SPIN描述子: 基于 spin image,构造支撑区域内旋转无关的二维的强度的直方图。 直方图的两维度分别是点到区域中心距离和点的强度。的值就是距离中心为强度为的点的出现概率。本文实现中两个维度的 bins 都取 10 个,共计 100 维特征。
RIFT描述子: 旋转不变版本的SIFT,构造的也是梯度方向直方图。具体来说,它将区域划分为等宽的同心环区域,在环内统计八方向梯度直方图。而梯度方向是相对点和中心连线的相对方向。 取 4 个环,共计 32 维特征。
其次为了使得特征对光照无关: 对SPIN, RIFT: 计算特征前用区域强度的均值和方差对区域作归一化处理。 而对RIFT: 将特征的范数放缩到 1。
最后,在本文实验中,将不同检测算子和不同描述子结合,得到不同的特征,作为一个特征的通道,使得可以使用融合特征分类。
局部特征匹配方法
以上两步获得描述子特征之后,考虑基于局部特征分布的图像相似度计算。本文选取了两种方法:
第一种方法是对每张图像的描述子进行聚类,得到图像的 signature: 。其中 是聚类的数量, 是各类中心, 是类中特征个数。
任意两个图像的 signature: , 的相似度计算用推土机距离(Earth Mover’s Distance)计算:
其中是两个聚类中心的距离,本文直接使用 L2 距离,是 flow value, 可以求解线性规划得到。另外,推土机距离不要求,所以两图像的signature 长度可以不同,
第二种方法是构建全局的纹理基元词库。纹理基元词库在特殊训练集上训练聚类算法得到。通过词库可以将图像表示为纹理基元的直方图,计算直方图之间的距离。 假设表示属于 类基元的描述子特征数量占该图像的所有特征数量的比例,两个图像直方图, 的距离用 距离计算:
本文将每类图像的聚类得到的 10 个纹理基元合并,得到纹理基元词库。
分类器和核函数
本文选择SVM作为分类器,对二分类任务使用 binary svm,对多分类任务,本文使用 1对1 的策略,对每一对类之间训练一个 svm,在测试阶段,使用所有分类器分类样本,并将出现次数最多的类作为样本的目标。 作者实验中验证了 1对1 策略和 1对多策略效果相近。
将上节的两种局部特征匹配方法融入到核函数计算,得到核:
取 EMD 或者 距离得到的核分别称为 EMD 核函数和 核函数。 是放缩系数,本文直接取为 的均值,发现不影响结果。
另外已经被证明是 Mercer 核,EMD 核并没有相关证明,但是本文作者在实验中使用 EMD核总可以使得数据的 Gram 矩阵正定,满足 Mercer 定理。
总体算法总结
一些存在疑问的地方、或者没有查阅的地方
- 仿射适应修正梯度算子还没完全明白
References
[1] Jianguo Zhang, M. Marszalek, S. Lazebnik and C. Schmid, “Local Features and Kernels for Classification of Texture and Object Categories: A Comprehensive Study,” 2006 Conference on Computer Vision and Pattern Recognition Workshop (CVPRW’06), New York, NY, USA, 2006, pp. 13-13, doi: 10.1109/CVPRW.2006.121.
[2] S. Lazebnik, C. Schmid and J. Ponce, “Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories,” 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 2006, pp. 2169-2178, doi: 10.1109/CVPR.2006.68.