prefaces
CV课的大作业,两篇论文: “Local Features and Kernels for Classification of Texture and Object Categories: A Comprehensive Study” 和 “Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories”,的阅读、方法的总结以及后者的实现。
本文针对第二篇。第二篇的实现代码: https://github.com/MercuriXito/Spm
Bags of Feature 在将图像表示为局部特征的无序集合时,丢弃了局部特征之间的结构特征。 本文就是针对 Bags of Feature 的无序性的改进。从空间和尺度两个方面对 Bags of Features 增强。 尺度上,本文借鉴了金字塔匹配核函数(Pyramid Matching Kernel)[3] 的思路计算两个特征集合的匹配。空间上,将不同类特征的空间位置作为新特征,并且作为金字塔匹配核函数的输入,得到匹配输出。
Contents
Pyramid Matching Kernel
金字塔匹配核函数[3] 用于计算图像特征的匹配,用于计算两个特征几何的匹配,该核函数已经被证明满足 Mercel 定理,可以是 svm 的核函数。
该匹配核函数的计算如下:假定向量是 d 维特征空间中的两个向量集合。首先对每个维度的特征建立分辨率为的网格,第层的网格将特征划分为段,并将d维的特征空间划分为总共 个cells。记为在分辨率的网格中,向量集合的以这个 cells 为 bin 的直方图,就表示两个向量集合中落入第个cell 的向量数。计算这两个直方图的交作为在层的匹配数:
将简记为。
注意到第层的匹配是包括了第层的匹配,所以第层新出现的匹配数为。对每一层的匹配赋权值,并且希望越细的网格上的匹配数权重越大,取,这样得到综合的匹配函数为:
Spatial Matching Scheme
本文的空间金字塔匹配的过程如下:
先和 Bags of Features 一样构建词库,将图像的特征划分成类。两图像的每一类()特征的点构成两个二维向量集合,集合中的每一个向量表示该类特征点的x,y坐标。于是可以使用金字塔匹配核函数计算的匹配程度,计算所有特征的匹配数,求和就得到本文的空间金字塔匹配:
可以看到,当时,金字塔只取整个图像一层,所以此时退化成 原始的 Bags of Features 特征的匹配。
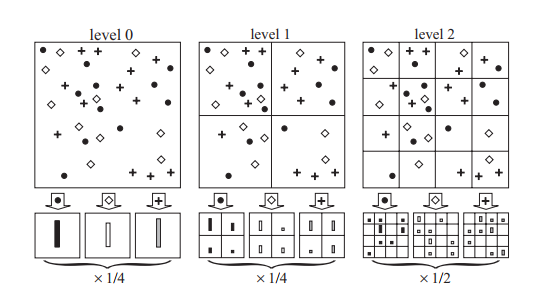
计算上,因为对正数有:,整体公式可以变为:
所以可以构建由组成的两个长向量,两个长向量按行取最小值,最后求和。该长向量的维度可以计算得到,为。单个向量的构建如图1所示。
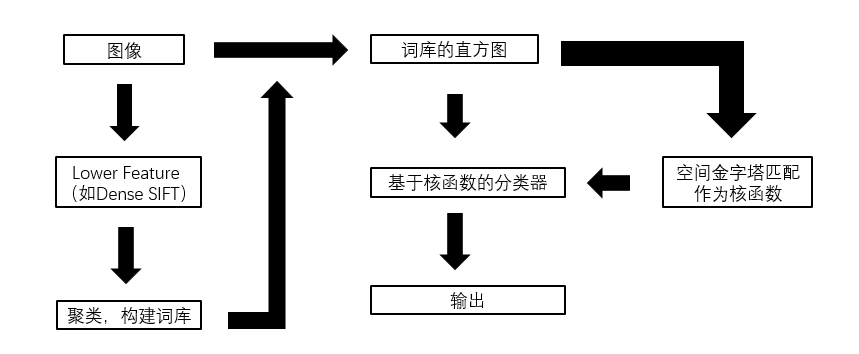
总结
算法总结如图所示:
Implementation
本文的方法还是容易实现的,我进行了简单的实现,并在Caltech101数据集上报告了测试结果。
Caltech 数据集
Caltech101 数据集[4]是CV之前的图像识别数据集的一种,共包括 102 类物体,物体的种类比较多样,有:手风琴、剑龙、阴阳图案、谷歌标志背景等。而且每一类内的图像在大小、颜色、视角等方面也比较多样。每一类的图像从 31 张到 900 多张不等,是当时视觉任务中最多样化的数据集的一种。大部分图像是中尺寸,所以实现上
按照论文的思路,将图像统一放缩到300x300大小,并且使用灰度图作为输入。
实验细节以及实验
部分实验的细节设计和处理:
(1) 图像预处理:如上文所述,依照原文的设定,输入将图像 resize 成统一 300x300 大小。 由于作者的实验中提到用彩色图的提升不大,所以实现也仅针对灰度图。
(2) 使用 Dense sift 作为底层特征,每隔 8 个像素,以该像素为中心取 16x16 大小的 patches,计算 sift 描述子。则一张输入的图像共计 37x37x128 个特征。
(3) 考虑到特征的数量比较大,词库的聚类使用 MiniBatchKMeans,训练取batch大小为1000,并且最多采样 20000 个随机 patches的描述子进行训练。
参数如下表:
| dense 区域大小 | 步长 | 聚类训练样本数 | 聚类batch大小 | 图像大小 |
|---|---|---|---|---|
| 16 | 8 | 20000 | 1000 | 300x300 |
其他细节参见代码:https://github.com/MercuriXito/Spm
Results
实验对词库大小,金字塔匹配层数,各类使用的训练样本大小超参数的影响进行了对比。
按照原文的设定,词库的大小,,。当每类取15个样本时,每类最多取20个样本作为测试集。当每类取30个样本时,每类最多取50个样本作为测试集。限于计算资源限制,大部分实验在时进行,时,取相应的表现较好的作为对比实验。指标选取平均的测试集的top-1准确率,和根据各类样本数加权的准确率。
实验结果如图3所示。
另外,本文没有对和本文较为无关的SVM模型的参数细调,仅使用默认参数,所以效果上不如原文的效果。
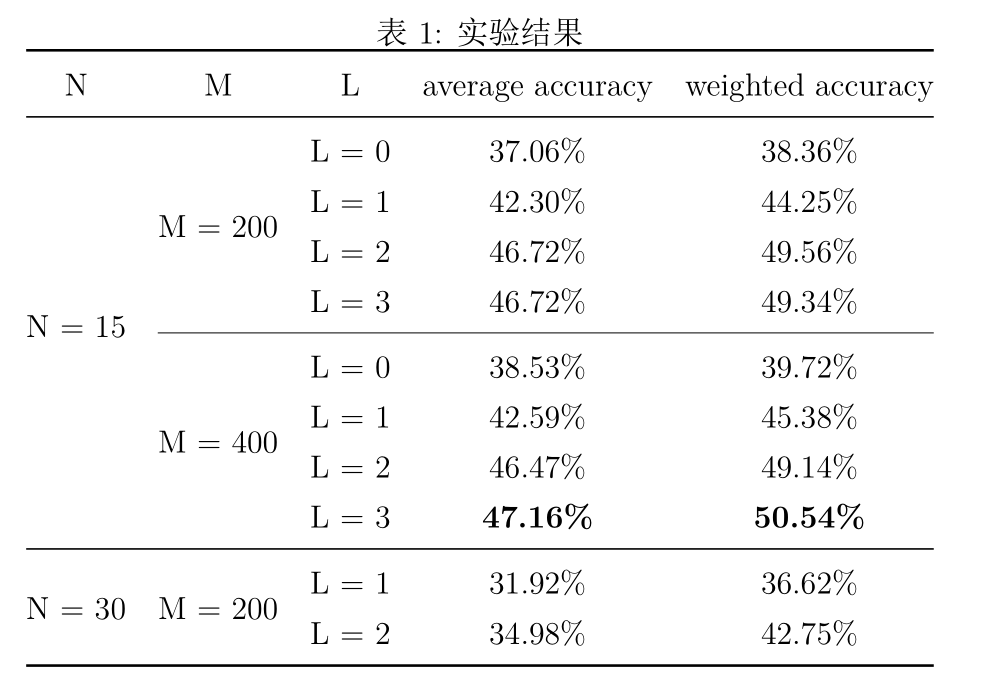
在的实验中,的模型在准确率和加权准确率上都取得了最好的表现。
- 模型的表现随着的增大而变好,说明本文方法确实有效,尤其是和(退化成BoF特征)对比,提升较大。
- 从训练效率来看,越大,计算时间增加地越多(向量长度呈指数级增长),而且较的提升也不大,选择是比较好的选择。
- 模型的表现随着的增大略有提升,但是基本不大(也可能是误差),所以已经足够,这个结论和原文同样一致。
除此之外,的模型较的模型差的比较多,一是因为时,测试集的样本也更多,第二个可能的原因是,时,测试集内各类样本的比例更不平衡,部分类样本少于50,甚至只有30多个样本,相比之下,时,总共取 35 个样本,各类数据更平衡。
References
[1] Jianguo Zhang, M. Marszalek, S. Lazebnik and C. Schmid, “Local Features and Kernels for Classification of Texture and Object Categories: A Comprehensive Study,” 2006 Conference on Computer Vision and Pattern Recognition Workshop (CVPRW’06), New York, NY, USA, 2006, pp. 13-13, doi: 10.1109/CVPRW.2006.121.
[2] S. Lazebnik, C. Schmid and J. Ponce, “Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories,” 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 2006, pp. 2169-2178, doi: 10.1109/CVPR.2006.68.
[3] Kristen Grauman and Trevor Darrell. The Pyramid Match Kernel: Discriminative Classification with Sets of Image Features. (ICCV’05)
[4] L. Fei-Fei and P. Perona. A bayesian hierarchical model for learning natural scene categories. In 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), volume 2, pages 524–531 vol. 2, 2005.